Authors: J. Caracotte, F. Morbidi, E. Mouaddib
Contact: MIS laboratory, Université de Picardie Jules Verne, Amiens, France
Email: jordan[dot]caracotte[at]etud[dot]u-picardie[dot]fr
This web page provides supplementary material (image datasets, Matlab/Blender code, calibration parameters) to reproduce the simulation and experimental results reported in our paper [1].
Image datasets:
- Synthetic images generated in Blender: Geodesic polyhedron, Room
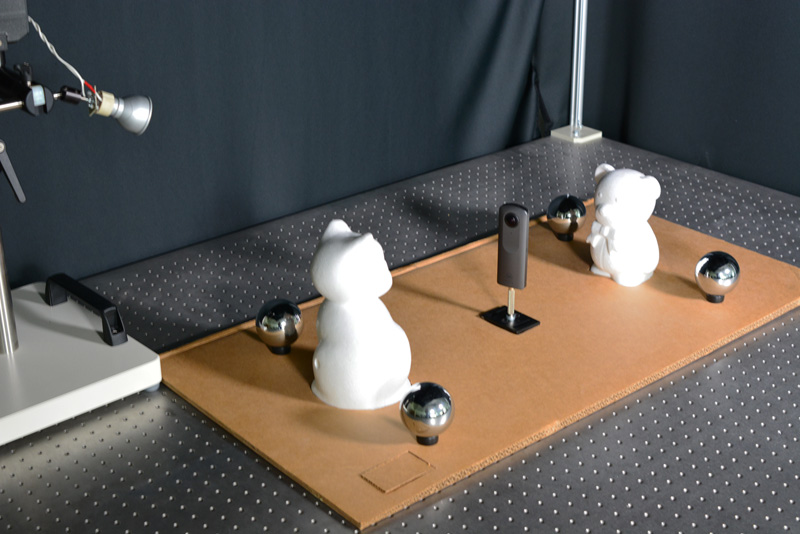
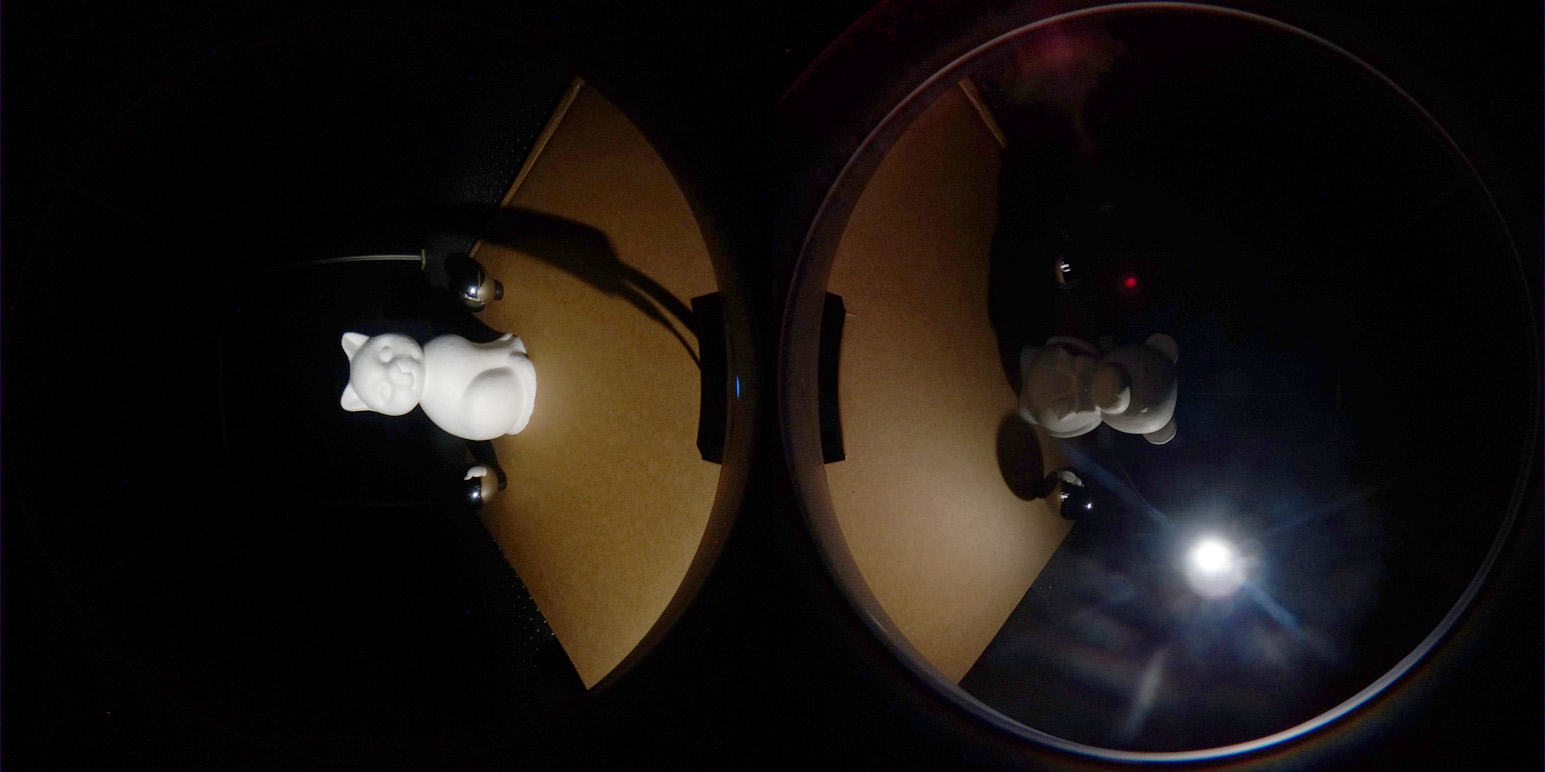
- Real-world images (Ricoh Theta V camera): Cat & Teddy Bear
Code:
- Gradient field estimation and normal integration: Matlab files
- Plug-in to modify the default camera settings of the Ricoh Theta V
References:
[1] Photometric Stereo with Twin-Fisheye Cameras, J. Caracotte, F. Morbidi, E. Mouaddib, in Proc. 25th Int. Conf. Pattern Recognition (ICPR), pp. 5270-5277, 2021 [pdf]
[2] Photometric Stereo with Central Panoramic Cameras, J. Caracotte, F. Morbidi, E. Mouaddib, Computer Vision and Image Understanding, vol. 201, art. 103080, December 2020 [web], [pdf]