Presentation
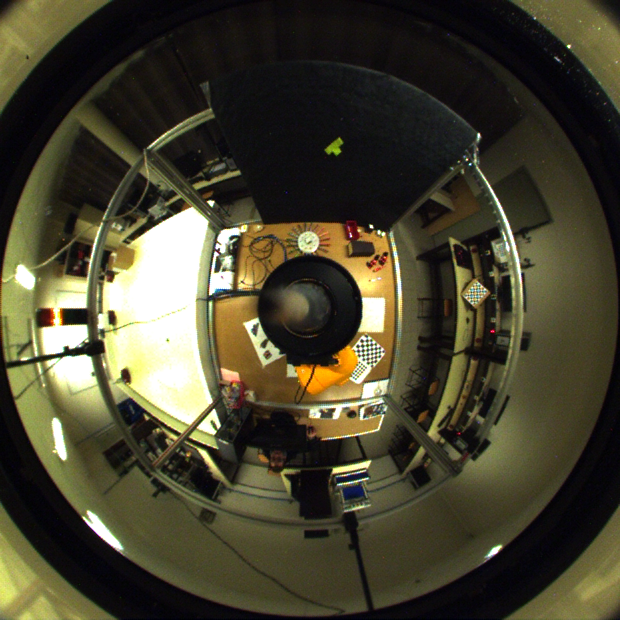
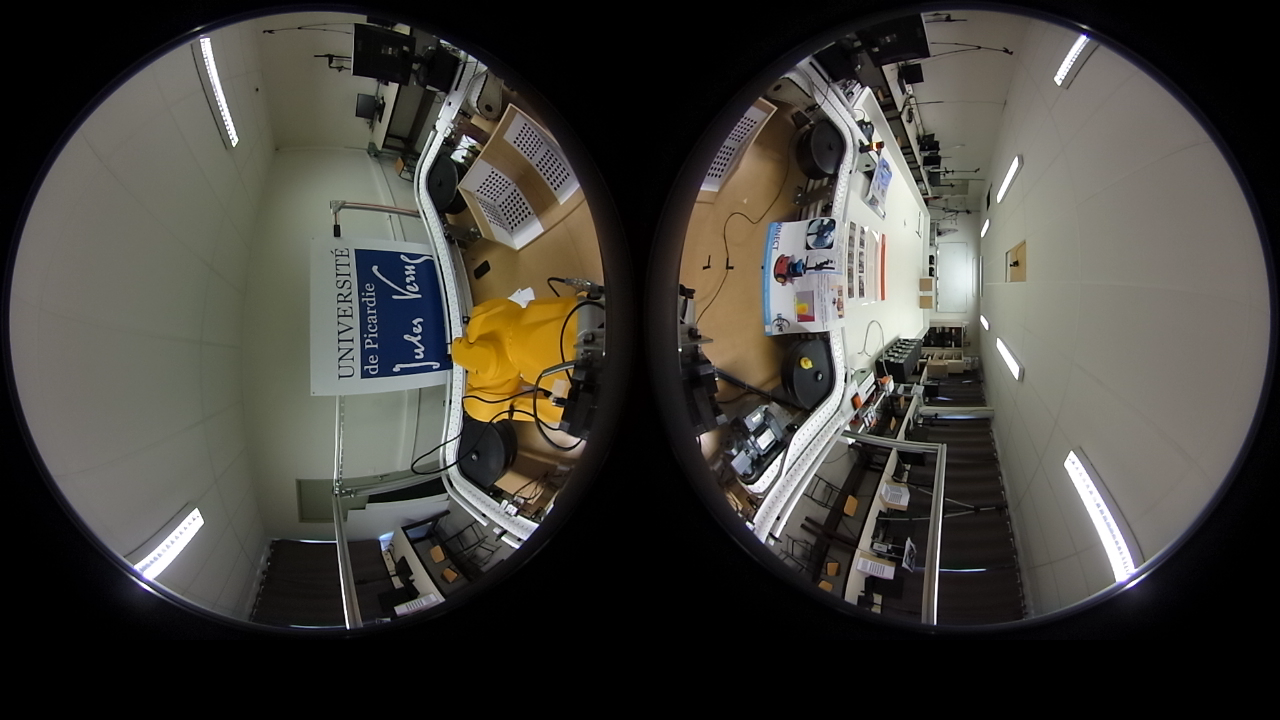
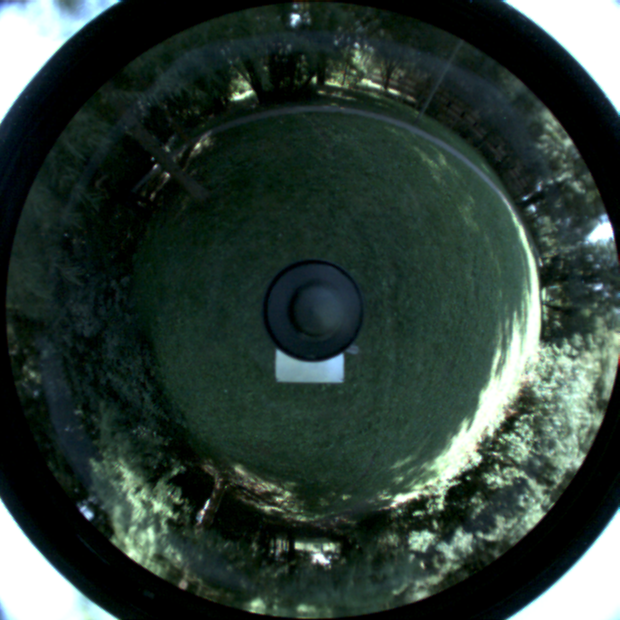
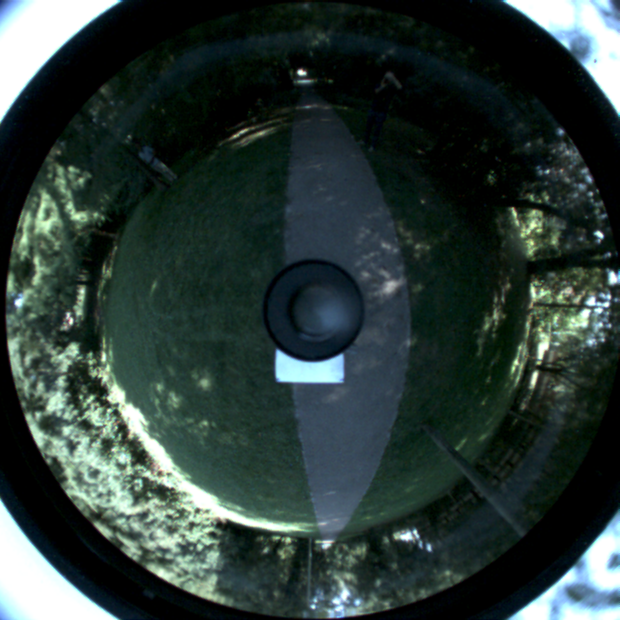
PresentationPanoraMIS is a dataset of ultra-wide field of view images with accurate ground truth, created by the MIS laboratory of the Université de Picardie Jules Verne, France. The dataset covers a large range of panoramic cameras (catadioptric, twin-fisheye), robotic platforms (wheeled, aerial and industrial robots), and testing environments (indoors and outdoors). PanoraMIS is well suited to validate new image-based robot-motion estimation algorithms, including visual odometry, visual SLAM, and deep learning-based methods. For further information about the dataset, see the accompanying paper:
"PanoraMIS: An Ultra-wide Field of
View Image Dataset for Vision-Based Robot-Motion Estimation",
H.-E. Benseddik, F. Morbidi, G. Caron, The International
Journal of Robotics Research, vol. 39, n. 9, pp. 1037-1051, August 2020  (pdf)
(pdf)
Some utilities :
-
General information on the calibration patterns
-
C++ code to transform a dual-fisheye image into an equirectangular image (see sequences 3, 4, 7 and 8)
Downloads
DownloadsMore details
{kind=link}
More details

{kind=link}
More details
More details

More details
{kind=link}
More details
{kind=link}
More details

More details
{kind=link}
Info Sequences
aboutSequence 1
About sequence 1 :
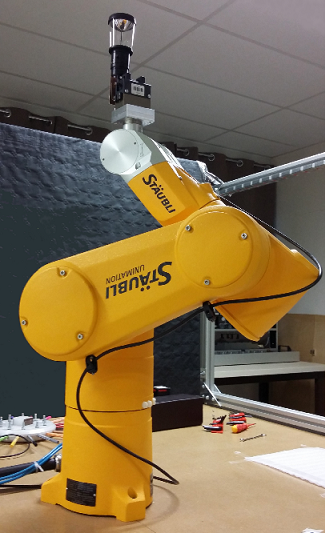
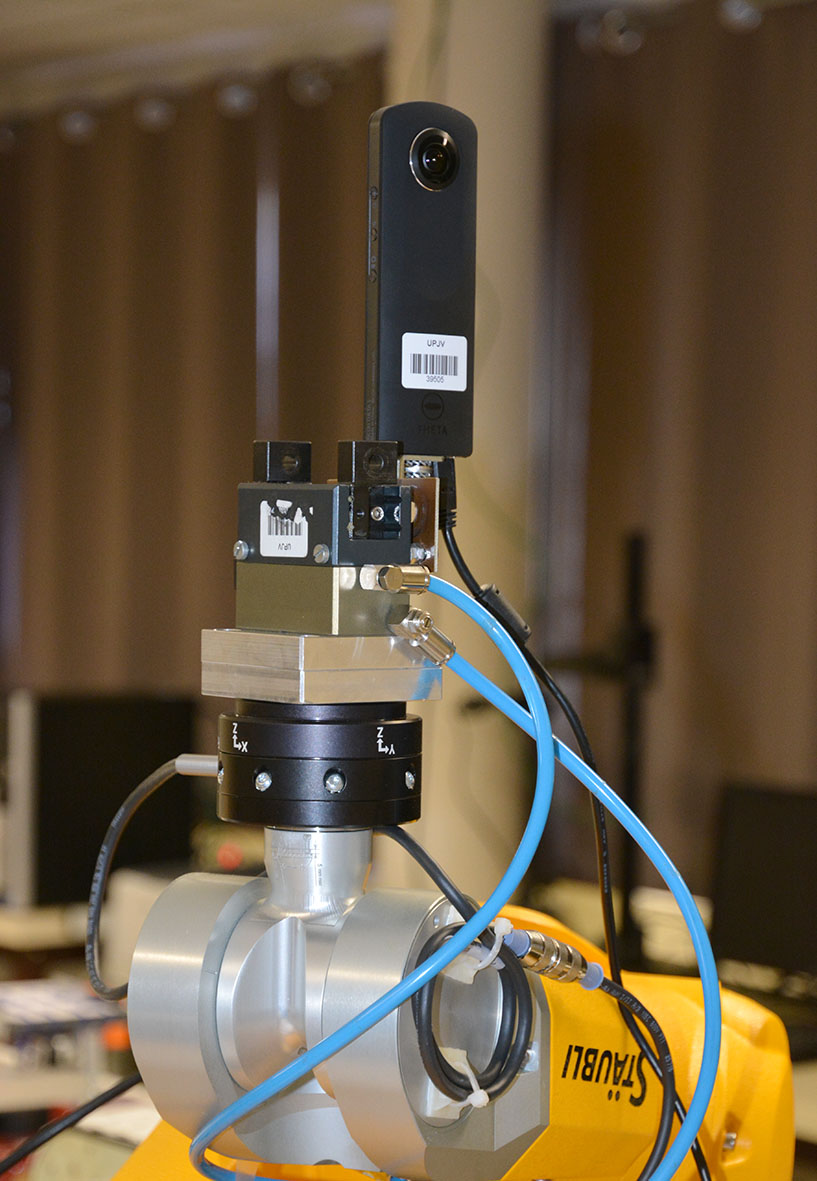
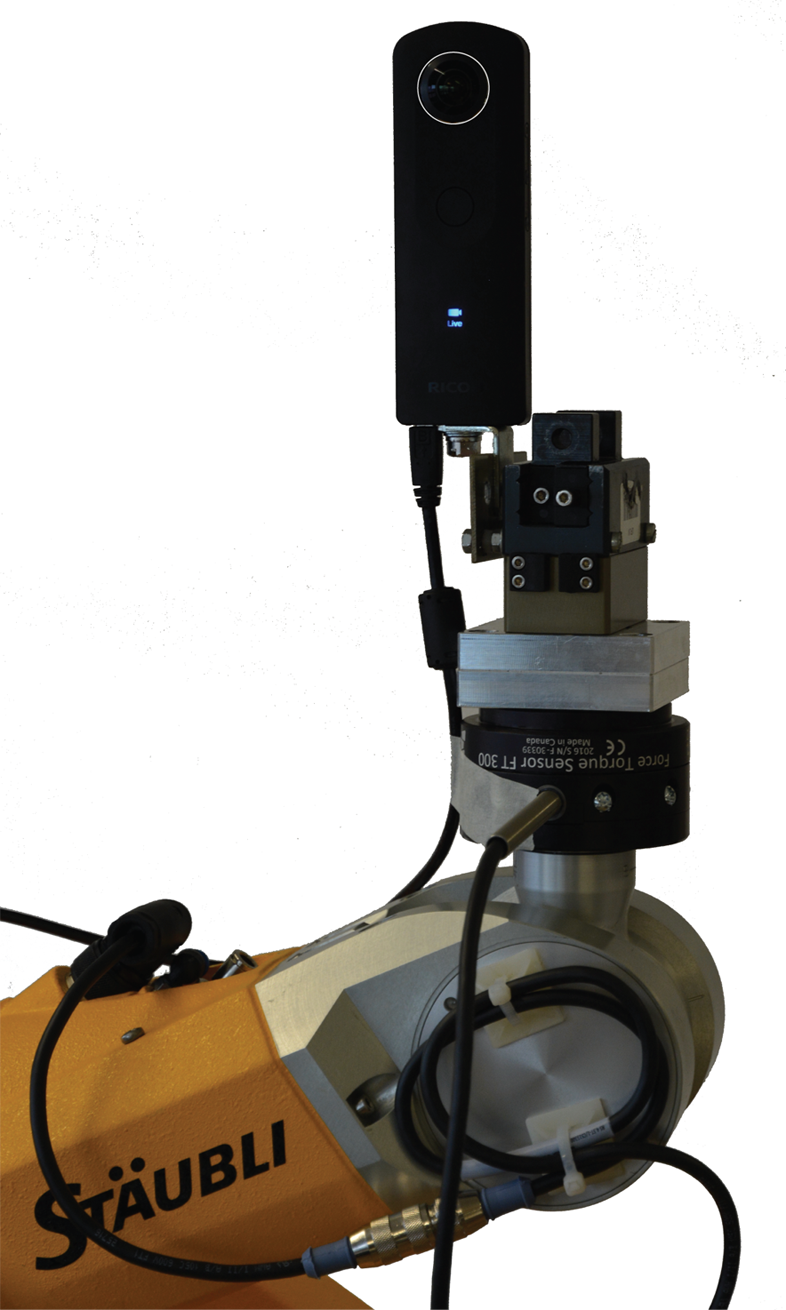
- Robot platform : Stäubli TX60
- Rotation about an axis
- Available data : poses.txt, times.txt
- Size : 2.27 GB
- Number of images : 3600
- Calibration data : 6 images, CameraParams.txt
Sequence 2
About sequence 2 :
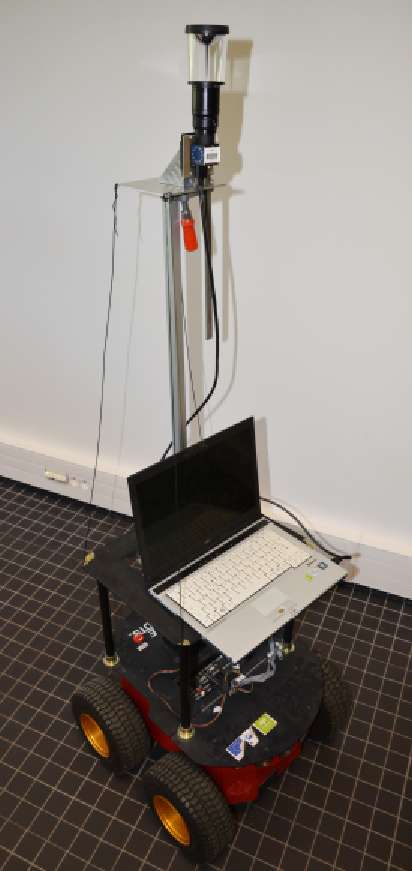
- Robot platform : Pioneer 3-AT
- Pure rotation
- Available data : poses.txt, times.txt
- Size : 66.3 MB
- Number of images : 158
- Calibration data : 8 images, CameraParams.txt
Sequence 3
About sequence 3 :
- Robot platform : Stäubli TX60
- Rotation about an axis
- Available data : poses.txt
- Size : 628 MB
- Number of images : 720
- Calibration data : 6 images, CameraParams.txt
Sequence 4
About sequence 4 :
- Robot platform : Stäubli TX60
- Rotation about three axes
- Available data : poses.txt
- Size : 83.7 MB
- Number of images : 94
- Calibration data : 6 images, CameraParams.txt
Sequence 5

About sequence 5 :
- Robot platform : Pioneer 3-AT
- Pure rotation
- Available data : poses.txt, times.txt
- Size : 79.3 MB
- Number of images : 156
- Calibration data : 8 images, CameraParams.txt
Sequence 6

About sequence 6 :
- Robot platform : Pioneer 3-AT
- Figure-of-eight trajectory
- Available data : poses.txt, times.txt
- Size : 155 MB
- Number of images : 318
- Calibration data : 8 images, CameraParams.txt
Sequence 7

OpenVSLAM - L1
OpenVSLAM - L2
Sequence 8

About sequence 8 :
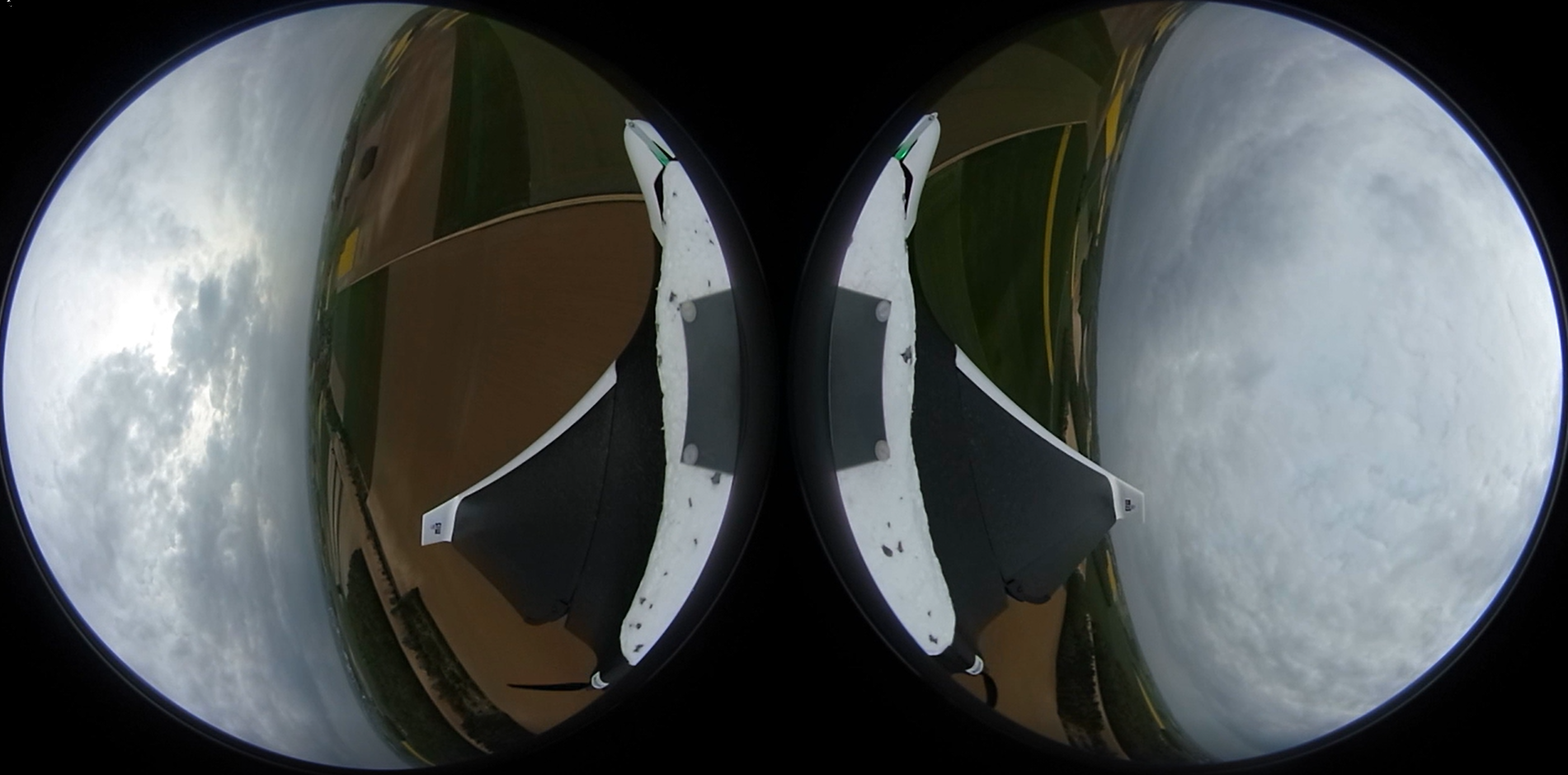
- Robot platform : Parrot Disco
- Available data : GPS.txt, IMUint.txt, times.txt
- Size : 769 MB
- MP4 video
Contact
contactLaboratory
Robotic Perception group, MIS Laboratory, Université de Picardie Jules Verne
Location
14 Quai de la Somme, 80080 Amiens, France
fabio.morbidi[at]u-picardie.fr
Phone
+33 (0)3 22 82 59 02
Reference
"PanoraMIS: An Ultra-wide Field of View Image Dataset for Vision-Based Robot-Motion Estimation",
H.-E. Benseddik, F. Morbidi, G. Caron, The International Journal of Robotics Research, vol. 39, n. 9, pp. 1037-1051, August 2020.
Funding
Funding This work was carried out as part of the Interreg VA France (Channel)
England ADAPT project Assistive Devices for
empowering disAbled People through robotic
Technologies
. The Interreg FCE Programme is a
European Territorial Cooperation programme that aims to fund
high quality cooperation projects in the Channel border
region between France and England. The Programme is funded
by the European Regional Development Fund (ERDF).
This project was also funded in part by the Conseil Régional des Hauts-de-France and by the CPER (Contrat de Plan État-Région) 2015-2020.
![]()