

Guillaume Caron


Home Research theme visual servoing matching/motion model-based tracking camera design Software Datasets Publications Teaching
 Formations dans lesquelles je suis impliqué
Formations dans lesquelles je suis impliqué
- Nouveaux contenus et actualités sur le nouveau site web des formations en robotique à l'UPJV :
www.u-picardie.fr/dpteea/robotique/
- Réseau des diplômés et étudiants de Robotique et Vision à l'UPJV sur Linkedin :
 .
.
-
Master Robotique et Vision Artificielle, RoVA (ex-ViRob) :
La vidéo de présentation du Master présente quelques unes des plateformes matérielles à disposition des étudiants pour les travaux pratiques et les projets tuteurés, ci-dessous :
-
Licence professionnelle Robotique et Vision Industrielles, RVI :
La vidéo de présentation de la Licence Pro RVI montre un aperçu des cellules robotisées sur lesquelles les étudiants travaillent en travaux pratiques et durant les projets tuteurés, ci-dessous :
Projets d'étudiants
-
Pixobot :
Projet d'étudiants de Master 2 ViRob en 2014-2015 et repris par des étudiants de Master 1 en 2015-2016, Pixobot prend une photo d'un sujet et le reproduit à l'aide de sa palette de feutres. Pixobot a participé au concours international Robot Art (http://robotart.org) en 2016, ce qui lui a valu d'être repéré par le magazine Tracks d'Arte, pour un reportage diffusé le 1er avril 2017 (http://tracks.arte.tv/robot-art).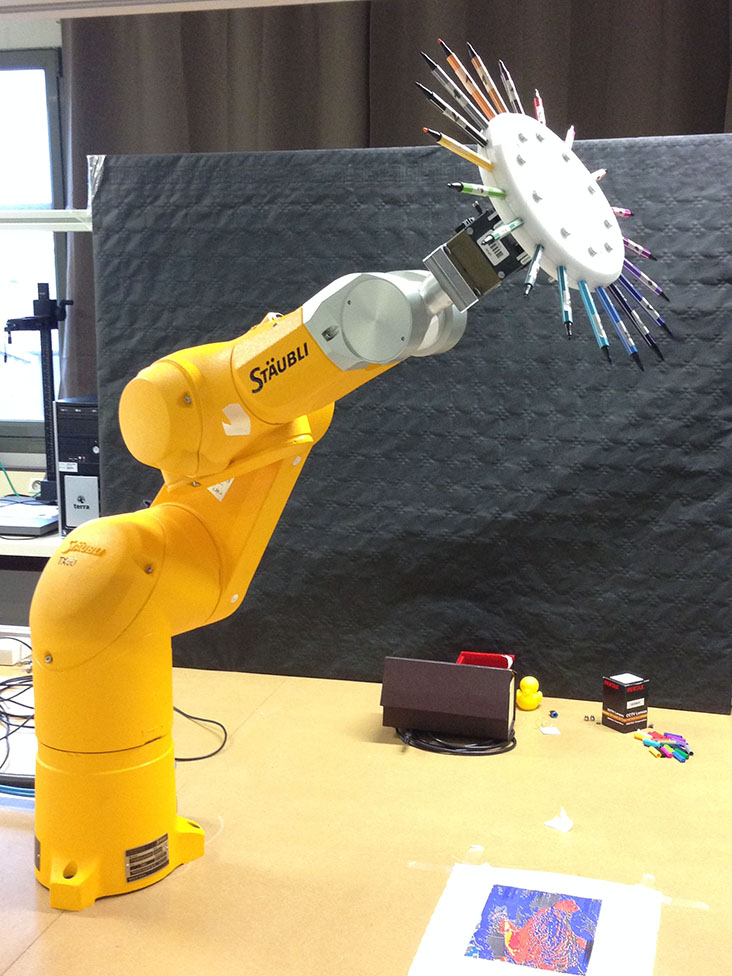
-
Puzzlebot :
Projet d'étudiants de Master 2 ViRob en 2015-2016, Puzzlebot utilise sa caméra pour analyser un puzzle et le réaliser en déplaçant les pièces une à une. Puzzlebot a été présenté pendant trois jours lors de l'événement "Connexions : les rencontres du numérique en Hauts-de-France" en 2016.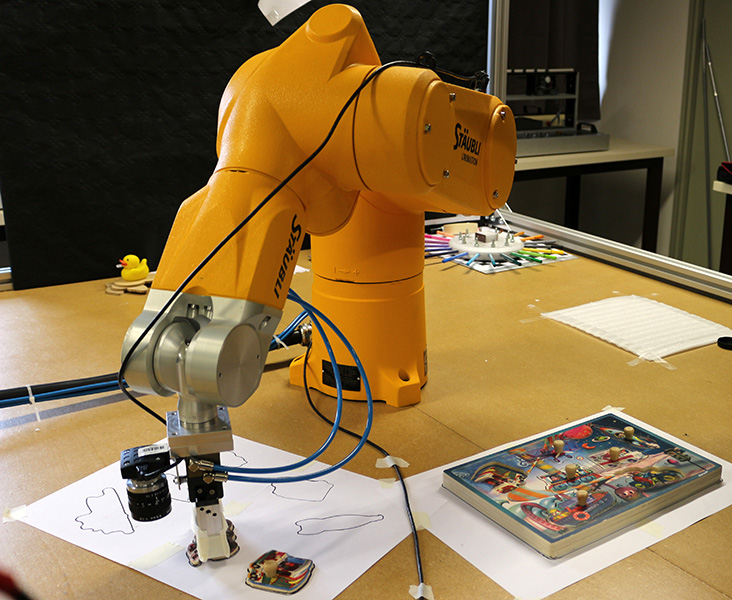
Unités d'enseignement
Ci-dessous figurent les différents enseignements dans lesquels j'interviens ou suis intervenu.
Vision avancée, Master 2 EEAII de l'UPJV
Chargé du module depuis 2011- Cours / TD / TP
- Matériel et logiciel pour les TP : caméras IDS, programmation C++ avec les libraires uEye, OpenCV et ViSP
Asservissement visuel, Master 2 EEAII de l'UPJV
Depuis 2012- Cours / TD / TP
- Matériel et logiciel pour les TP
- caméras IDS, programmation C++ avec les libraires uEye, OpenCV et ViSP
- robot manipulateur industriel à partir de fin 2013
Vision non conventionnelle, Master 2 EEAII de l'UPJV
Depuis 2012- Cours / TD / TP
- Matériel et logiciel
- caméras IDS, programmation C++ avec les libraires uEye, OpenCV et ViSP
- robots Amigobot (MobileRobots) avec interface graphique MobileEyes et programmation C++ avec la libraire ARIA
Vision industrielle, Licence professionnelle RVI de l'UPJV (site de Nogent-sur-Oise)
Depuis 2011- Cours
Localisation et navigation de robot mobile, Master 2 EEAII de l'UPJV
Depuis 2011 (MIES en 2008/2009)- Cours / TD / TP
- Matériel et logiciel : robots Amigobot (MobileRobots) avec interface graphique MobileEyes et programmation C++ avec la libraire ARIA
Robotique mobile, Master 2 EEAII de l'UPJV
Chargé du module en 2011/2012- Cours / TD
- Matériel et logiciel pour les TP : robots Amigobot (MobileRobots) avec interface graphique MobileEyes et programmation C++ avec la libraire ARIA
Multi-sensor fusion and tracking, International masters on computer vision de l'Université de Bourgogne (Le Creusot)
Intervenant depuis 2012- Cours / TD / TP
- Matériel et logiciel pour les TP : caméras Logitech motorisées, programmation C++ avec la librairie ViSP
Autres enseignements réalisés par le passé à l'UPJV
- Algorithmique, Licence 1 Sciences de l'UPJV
- Période : 2007 - 2010 (MIES)
- Nature : TD / TP (programmation Java)
- Traitement d'images et vision par ordinateur, Master 1 GEII de l'UPJV
- Période : 2007 - 2008 (MIES)
- Nature : TP (langage C et librairie OpenCV)