



Home Research theme visual servoing matching/motion model-based tracking camera design Software Datasets Publications Teaching
 libPeR: Library of Perception for Robotics
libPeR: Library of Perception for Robotics
Started in 2017 as the library of the Robot Perception group at MIS lab, France, libPeR's contributors now range up to Japan. The library gathers C++ developments made in research works about modeling sensors, particularly unconventional cameras (paracatadioptric, central panoramic, spherical polydioptric and equirectangular) for the most original, possibly mounted as stereoscopic rig, motion estimation of camera from its images (eg. spherical visual gyroscope), visual servoing (with Photometric Gaussian Mixtures in perspective and spherical vision), etc.
The content of libPeR is growing constantly since its base has been made open source in 2020: github.com/PerceptionRobotique/libPeR_base.
Integrating this library in its own software allows implementing quickly the projection models of unconventional cameras of which intrinsic and extrinsic parameters are directly output from a calibration with MIXEDVISION, the open-source child of Hyscas, or other software involving the same camera models (eg. Christopher Mei's Omnidirectional Camera Calibration Toolbox for Matlab), whether set in the C++ code or in a xml file to load.
Other opensource software are available from the github.com/PerceptionRobotique space, and more to come.
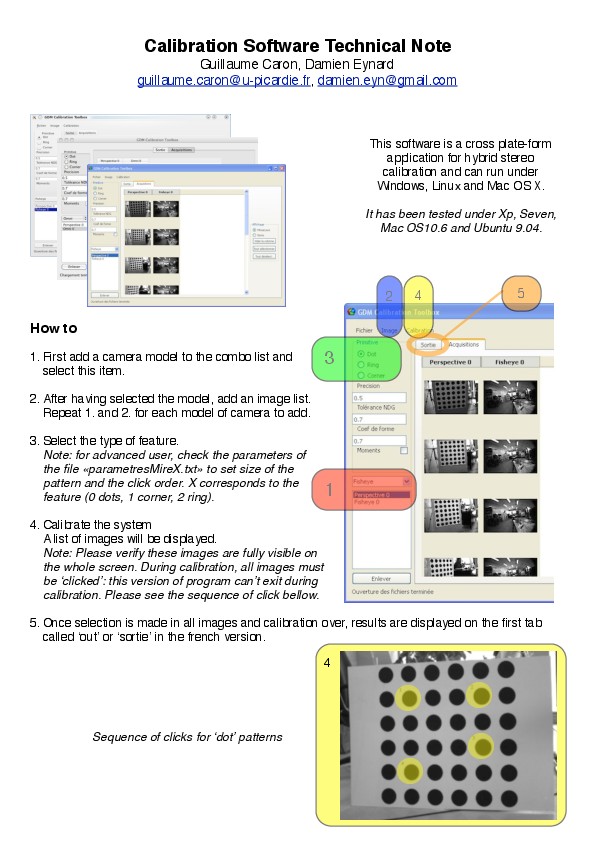
Hyscas: Hybrid Stereoscopic Calibration Software
HySCaS implements the stereoscopic calibration method that estimates simultaneously intrinsic and extrinsic parameters, designed during my PhD thesis. The software was developed with Damien Eynard. Stereo rigs with various camera models are calibrated by this software developed for Windows 7 in C++ with Qt, ViSP and OpenCV libraries.
Initialy available at www.hyscas.com, HySCaS is now directly available here: download HySCaS.
Additional downloads are available below:
|
|
Hyscas is free of use for academic research. If you use Hyscas, please cite the following paper:
Guillaume Caron, Damien Eynard, Multiple Camera Types Simultaneous Stereo Calibration, IEEE International Conference on Robotics and Automation, ICRA, pp. 2933-2938, Shangai, China, May 2011. PDF
about which you can find more information in the pose estimation and calibration section of the model based-tracking theme.