



Accueil Thème de recherche asservissement visuel appariement/mouvement suivi visuel 3D conception de caméra Logiciels Données Publications Enseignements
 libPeR : Bibliothèque de Perception pour la Robotique
libPeR : Bibliothèque de Perception pour la Robotique
Créée en 2017 comme la librairie de l'équipe Perception Robotique du laboratoire MIS à Amiens, libPeR reçoit désormais des contributions jusqu'en provenance du Japon. Elle rassemble des développements C++ réalisés dans les travaux de recherche à propos de modélisation de capteurs, en particulier les caméras non-conventionnelles (paracatadioptrique, panoramique centrale, polydioptrique sphérique et équirectangulaire) pour les plus originaux, possiblement montées en banc stéréoscopique, estimation de déplacement de caméra à partir des images (ex : gyroscope visuel sphérique), asservissement visuel (par Mélanges de Gaussiennes Photométriques en vision perspective et sphérique), conversions entre modèles de caméras, etc.
Le contenu de libPeR s'enrichit en permanence depuis que sa base a été rendue disponible librement en 2020 : github.com/PerceptionRobotique/libPeR_base.
L'intégrer dans ses logiciels permet de mettre en oeuvre rapidement les modèles de projection de caméras non-conventionnelles dont les paramètres intrinsèques et extrinsèques sont directement issus d'un étalonnage avec MIXEDVISION, le descendant open-source de Hyscas, ou d'autres logiciels exploitant les mêmes modèles de caméras (ex : Omnidirectional Camera Calibration Toolbox de Christopher Mei pour Matlab), qu'ils soient renseignés directement dans le code C++ ou dans un fichier xml.
D'autres logiciels libres sont disponibles à partir de l'espace github.com/PerceptionRobotique, et d'autres sont à venir.
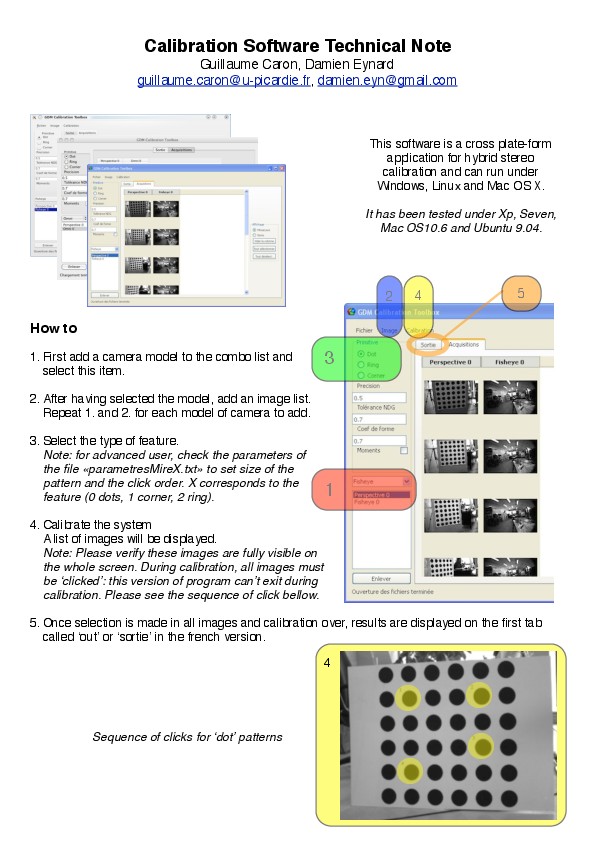
Hyscas : Logiciel d'étalonnage stéréoscopique hybride
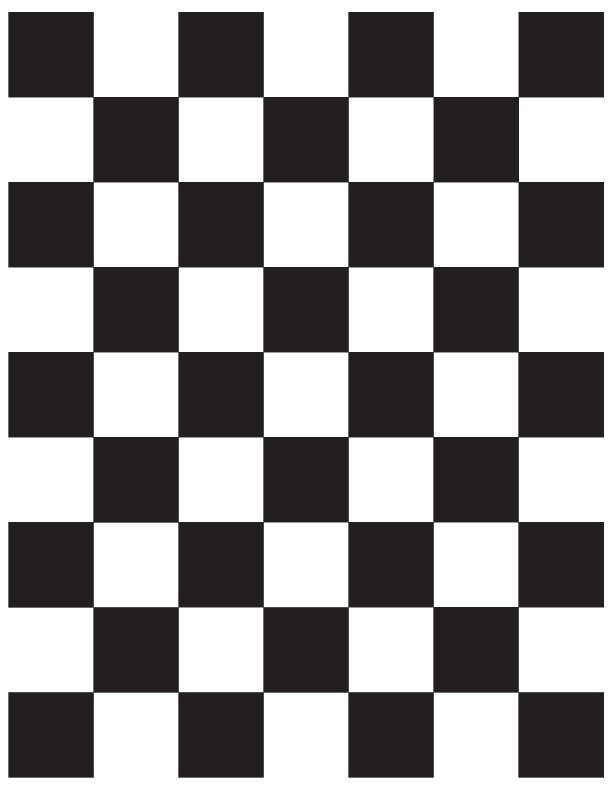
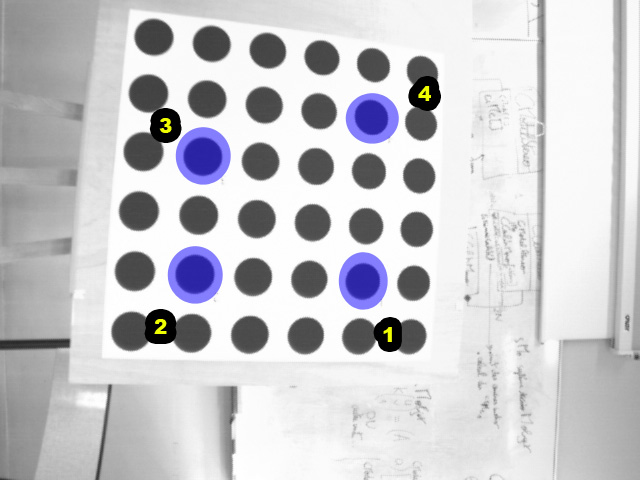
Le logiciel HySCaS (Hybrid Stereoscopic Calibration Software) est l'implantation de la méthode d'étalonnage stéréoscopique simultané intrinsèque et extrinsèque que j'ai élaborée durant ma thèse. Le logiciel a été développé avec Damien Eynard. Des bancs stéréo à différents modèles de caméra sont étalonnés par ce logiciel développé pour Windows 7 en C++ avec les librairies Qt, ViSP et OpenCV.
Initialement disponible à l'URL www.hyscas.com, HySCaS est désormais directement disponible ici : télécharger HySCaS.
Quelques téléchargements complémentaires sont accessibles ci-dessous :
|
|
Guillaume Caron et Damien Eynard, Multiple Camera Types Simultaneous Stereo Calibration, IEEE International Conference on Robotics and Automation, ICRA, pp. 2933-2938, Shangai, Chine, Mai 2011. PDF